Установка rosa fresh r11
Содержание:
- Настройка сети
- Взаимодействие с Windows
- Исправления сбоев при работе
- Настройка ПО из образа
- Установка
- Комьюнити-релизы ROSA Marathon
- Резюме
- 2013
- Линейка продуктов Линукс ROSA
- Дистрибутив Linux ROSA Desktop Fresh R6
- Установка
- Управление пакетами
- RED ОС
- Первые впечатления
- Подготовка к установке Rosa
- Резюме
- Установка Rosa Linux Fresh R11
- История ОС
- Выводы
Настройка сети
Настройка сетевых и wifi карт Mediatek/Ralink и Realtek
Для следующих карт в репозиториях Росы есть дополнительные драйвера, попробуйте вашу карту с ними:
- Mediatek MT7630E — dkms-mt7630e
- Realtek RTL8812AU — dkms-rtl8812au
- Realtek RTL8723BE, RTL8723AE, RTL8192CE, RTL8192SE, RTL8192DE, RTL8188EE, RTL8192EE, RTL8821AE — dkms-rtlwifi_new
- Realtek RTL8101/2/6E — dkms-r8101
- Realtek RTL8168*/8111* — dkms-r8168
Настройка сетевых карт Broadcom
По-умолчанию используется драйвер wl, но можно попробовать драйвер b43. Для этого установите пакет
b43-firmware, удалите пакет dkms-broadcom-wl и перегрузитесь.
Взаимодействие с Windows
Не монтируется диск NTFS с Windows последних версий
Для корректной работы Windows и ROSA Linux на одном компьютере рекомендуется отключить в Windows «быстрый старт» — эта технология, по сути, аналогична «спящему режиму» Росы и наша система старается не трогать разделы, где «спит» windows чтоб ее не сломать.
- Для отключения в консоли Windows под администратором наберите powercfg -h off
- Чтоб смонтировать NTFS диск «насильно» можно в ROSA Linux выполнить # ntfsfix /dev/<имя раздела с ntfs>(sda, sdb)
Пропала строка с запуском Windows из загрузчика grub
Корень проблемы — «быстрый старт» системы Windows или некорректное завершение работы в этой системе, совпавшее с обновлением загрузчика или ядра в ROSA Linux. Загрузчик ROSA не монтирует диск NTFS требующий проверки или тот, на котором «спит» windows. Для исправления:
- Смонтируйте NTFS диск в Dolphin
- Выполните в консоли # update-grub2
Исправления сбоев при работе
После установки проприетарных драйверов или обновления ядра система не грузится
- Попробуйте загрузиться с другим ядром, выбрав его в начальном меню загрузки
- Если загрузчик grub системы, где вы устанавливали драйвера, не основной (ваша система — не первая строчка) то загрузитесь в основную систему и обновите там grub командой update-grub2 (для Росы)
- Дождитесь окончания текстовой загрузки (около 4 минут), переключитесь в текстовую консоль ctrl+alt+F2, войдите под root и, запустив XFdrake, переключите видеоподсистему на свободный драйвер и потом попробуйте еще раз
Черный экран при входе в систему, после ввода пароля в KDE 4
По какой-то причине (некорректное завершение работы?) повредились настройки вашего рабочего стола.
вызовите krunner alt+F2 и выполните команду
kde4-reset
Ваш рабочий стол будет сброшен к виду «по-умолчанию»
Возможно, повреждена база RPM. Для ее восстановления выполните с правами администратора команду
rpm-restore
Вы включили режим заморозки ROSA Freeze. Выключите его.
Настройка ПО из образа
Не работает база данных библиографии в LibreOffice Writer
Для работы пункта «Сервис/база данных библиографии» вам необходимо установить LibreOffice Base (пакет libreoffice-base) и OpenJDK. Для экономии места мы не включили эти пакеты в установочный образ ROSA Fresh.
Установка
Первым препятствием, которое мне пришлось преодолеть, была загрузка ISO-образа. ROSA родом из России, и когда я впервые посетил , я обнаружил, что раздел сайта на английском языке довольно ограничен. Например, на главной странице редакции home показаны примечания к выпуску старых выпусков ROSA (R8 и R9), а ссылка на скачивание привела меня на страницу, написанную на русском языке. К счастью, названия доступных настольных сред на странице загрузки приведены на английском языке, поэтому получить правильный образ ISO не так уж сложно.
Примерно в середине процесса я наткнулся на отдельный домен ROSA для англоязычного рынка: . Раздел загрузок для этого домена на английском языке, но в нем нет ROSA Fresh R11 (самая последняя версия — R10). Точно так же самая последняя новостная статья относится к декабрю 2017 года. Похоже, что веб-сайт больше не поддерживается (что также может объяснить, почему домен не имеет сертификата SSL).
ROSA предлагает ISO-образы для четырех разных сред рабочего стола, и для каждой версии вы можете загрузить 32- или 64-битный образ. Интересно отметить, что первой в списке средой рабочего стола является KDE4 (последний стабильный выпуск которой состоялся в августе 2015 года). Далее следует KDE Plasma, за которым следуют LXQt и Xfce.
Я выбрал 64-битный ISO-образ с Plasma , размер которого составляет 2,2 ГБ. Загрузка с ISO-образа предоставляет вам графическое меню загрузки, в котором первый вариант — «Boot from local drive». Эта опция пытается загрузить операционную систему, установленную на вашем компьютере, что в моем случае привело к ошибке «boot failed». Кажется странным, что по умолчанию не загружается ROSA — при загрузке с ISO вы, вероятно, хотите протестировать и/или установить образ.
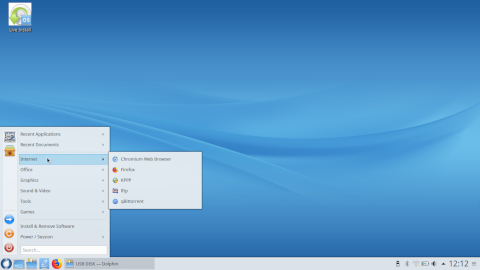
После перезагрузки моего ноутбука я попытался запустить ROSA в live-сессии. Все сработало, как и ожидалось, и мне очень нравится собственная тема ROSA («ROSA Desktop Fresh»). Она чистая и несколько традиционная, с единственной панелью внизу экрана. Меню приложений можно запустить, щелкнув логотип ROSA на панели или нажав клавишу super. Само меню выводит список приложений в традиционном дереве и включает поле поиска, которое автоматически получает фокус (так что вы можете сразу начать поиск в меню).
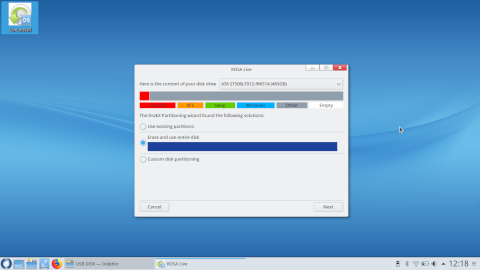
Установщик может быть запущен изнутри live-сессии. Первым шагом является разбиение жесткого диска (возможно, лучше всего сначала сделать самую страшную часть). Вы можете использовать существующие разделы, позволить ROSA захватить весь диск или создать пользовательские разделы. Когда вы разрешите ROSA забрать весь диск, вы получите раздел подкачки (4 ГБ, в моем случае), корневой раздел 20 ГБ и домашний раздел, занимающий оставшееся пространство. И корневой, и домашний разделы используют файловую систему ext4.
Когда я впервые установил ROSA, я не заметил, что опция шифрования жесткого диска доступна только при создании пользовательских разделов. Поскольку я устанавливал ROSA на ноутбуке, я хотел использовать шифрование, и поэтому я переустановил ROSA вскоре после завершения установки. Настраиваемое разбиение было интуитивно довольно понятным: я мог создать загрузочный раздел и физический том LVM, в котором я мог бы настроить раздел подкачки и разделы XFS для корневого и домашнего разделов.
После создания разделов ROSA начинает копирование файлов на жесткий диск. Пока установщик занят, вы можете посмотреть несколько слайдов. Большинство дистрибутивов используют такие слайды, чтобы сообщить новым пользователям, где найти помощь или какие приложения они могут захотеть установить, но ROSA просто отображает лозунги, такие как «A Russian Linux developer company» и «Russian distro of European origin».
Затем вам нужно выбрать, куда вы хотите установить загрузчик (опция по умолчанию, вероятно, будет правильной) и установить количество секунд, по истечении которых будет загружаться образ по умолчанию (по умолчанию — пять). На остальных экранах вы устанавливаете пароль root, создаете учетную запись пользователя и выбираете, хотите ли вы включить CUPS, Samba и SSH. Я обнаружил, что установщик имеет хороший баланс между простотой и предложением различных расширенных возможностей.
Комьюнити-релизы ROSA Marathon
| • Краткое описание ROSA LXDE 2012 LTS |
| • Краткое описание ROSA Marathon 2012 GNOME Edition |
|
Версия 64-бит Вышла: 7 августа 2012 |
Версия 64-бит Вышла: 20 июня 2012 |
| • Обзор релиза ROSA Desktop 2011 Extended Edition |
| • Обзор релиза ROSA Desktop 2011 |
| • 2011.0 Errata |
| • Список известных проблем в ROSA Desktop 2011 |
|
32 бит Дата выхода: 23-Dec-2011 64 бит Дата выхода: 23-Dec-2011 32 бит Дата выхода: 28-Aug-2011 64 бит Дата выхода: 28-Aug-2011 |
| • Обзор релиза ПСПО6 |
| • Список известных проблем в ПСПО6 |
|
32 бит Дата выхода: 31.01.2012 |
Релизы ROSA Desktop 2011 GE (Gnome Edition) выпускаятся сообществом пользователей РОСА.
Резюме
Роса Р6 КДЕ это шаг назад по сравнению с Роса Р5
Л-Икс-Д-Е. Это мое мнение. ROSA R5 LXDE был очень
удачным релизом. Впрочем, при установке на жесткий
диск, ничто не мешает заменить KDE на LXDE.
P.S.
Если вы живете в г. Краснодар и страстно желаете установить ROSA Desktop.Fresh
R6 KDE
или просто «пощупать» ее — звоните, пишите: Подробнее…
Иван Сухов, 2015 г.
Поделитесь этим сайтом с друзьями!
Если вам оказалась полезна или просто понравилась эта статья, тогда не стесняйтесь — поддержите материально автора. Это легко сделать закинув денежек на Яндекс Кошелек № 410011416229354. Или на телефон +7 918-16-26-331.
Даже небольшая сумма может помочь написанию новых статей 🙂
Или поделитесь ссылкой на эту статью со своими друзьями.
Сопутствующие статьи
|
|
2013
Бета ROSA Fresh R1 на платформе GNOME 3.8
О выходе публичной беты официальной сборки дистрибутива ROSA Fresh R1 на базе рабочего стола GNOME версии 3.8 сообщила компания «РОСА» 18 июля 2013 года.
В основе — KDE и LXDE
Cборка основана на тех же репозиториях, что ранее представленные версии ROSA Desktop Fresh R1 на базе KDE и LXDE.
Главные особенности релиза
- Добавлена возможность использования типографской раскладки Бирмана.
- По умолчанию используется белая тема оформления GNOME Shell.
- Из коробки доступны некоторые расширения, такие как Dash to Dock, Weather, Notification Alert, Alternative Status Menu, классический режим GNOME и др.
- В качестве браузера по умолчанию было принято решение вернуться на Firefox из-за проблем с получением ключей для API Chromium.
- Использование утилиты gnome-initial-setup для первоначальной настройки окружения при первом входе нового пользователя в систему.
- В GNOME Control Center перенесена возможность настройки отображения шрифтов из утилиты gnome-tweak-tool.
- По умолчанию используются патчи из Ubuntu для улучшенного отображения шрифтов на LCD мониторах.
Компоненты ROSA Desktop Fresh R1 GNOME
- Ядро Linux версии 3.8.12
- Firefox 22
- Evolution 3.8.3
- Libreoffice 3.6.6
- ROSA Media Player 1.6.
Разработчики предупредили о возможных недоработках, поэтому использование этого образа рекомендуется, в первую очередь, опытным пользователям, желающим принять участие в тестировании.
ROSA Desktop Fresh R2
ROSA Desktop Fresh R2 — плановое обновление платформы ROSA Fresh. Линейка «R» предназначается для технически грамотных пользователей, желающих получить свежие версии ПО, имеющих достаточно новое оборудование и не предъявляющих повышенных требований к стабильности системы. Это семейство дистрибутивов развивается как силами специалистов компании «РОСА», так и силами сообщества. По сравнению с R1, обновлено множество системных компонентов (ядро версии 3.10.19, systemd-204, Xorg-1.14), окружение рабочего стола (KDE 4.11) и пользовательское ПО (Firefox-25, Libreoffice-4.1 и т.д.). Доработан ряд системных утилит. Помимо этого, установочный образ включает в себя все исправления, улучшения и дополнения, выпущенные с даты предыдущего релиза R1. Данная версия ROSA Desktop Fresh R2 включает в качестве основного окружения рабочего стола KDE4. В ближайшее время будут представлены редакции системы с обновленным рабочим столом GNOME и LXDE.
Линейка продуктов Линукс ROSA
С официального сайта компании, для собственного использования, любой пользователь бесплатно может скачать ОС ROSA Fresh. Она распространяется версиями x64 и x86, даёт выбор среды рабочего стола, Secure Boot, UEFI, остальной требуемой периферии. Комплект поставки имеет большой набор программного обеспечения.
Для использования в организациях отдельно есть поставка ROSA Enterprise Desktop. Она не предусматривает спецтребований по информационной безопасности. Поддерживает совместимость с остальными продуктами компании. Дистрибутив изначально создан в среде полного цикла ABF.
После установки предлагает широкий набор офисных программ. Возможен запуск программ и функционала стороннего производителя благодаря Linux Starndard Base.
Серверные решения компания предлагает строить на ОС ROSA Enterprise Linux Server (RELS). Содержит качественный уникальный функционал по управлению сетевыми ресурсами.
Линукс РОСА в этом исполнении обеспечивает поддержку ко всем приложениям: коммерческим, свободным. ОС полностью совместима с CentOS 6.x и Red Hat. Не требуется много времени на настройку.
Центры обработки данных могут выбрать со средой виртуализации ROSA Virtualuzation. В этом случае обеспечивается поддержка до тысячи виртуальных машин. Разграничение доступа производится на уникальном разработанном уровне.
Вся работа производится в частной «облачной» среде. Система следит за возможностью утечки, блокирует любое неправомерное использование информации.
Для корпоративной среды вместе с государственными учреждениями компания предлагает линейку, названную металлами: в первую очередь РОСА «ХРОМ», а также РОСА «НИКЕЛЬ» И РОСА «КОБАЛЬТ». Данные дистрибутивы предназначены исключительно для крупных информационных сетей, установка их, настройка и возможное обслуживание производится непосредственно интеграторами производителя.
Дистрибутив Linux ROSA Desktop Fresh R6

ROSA Desktop Fresh R6 – бесплатный дистрибутив операционной системы Linux, разработкой и развитием которого занимается российская компания «НТЦ ИТ РОСА» и сообщество дистрибутива. Данный дистрибутив идет в ногу со временем и ориентирован на новизну, о чем свидетельствует оригинальный интерфейс системы и новые версии программ, которые включены в него по умолчанию.
В качестве среды рабочего стола по умолчанию выступает KDE, но можно также установить GNOME, LXDE, XFCE, Mate и Enlightenment.
Дистрибутив поддерживает архитектуры процессора i586 и x86_64. Он является многоязычным и, конечно же, поддерживает русский язык.
Как я уже сказал, ROSA Desktop Fresh обладает оригинальным и самое главное интересным дизайном чему способствуют собственные разработки компании, например:
SimpleWelcome – это единая точка запуска приложений, сгруппированных по своему функциональному назначению, например Интернет, офис, графика, игры и т.д. SimpleWelcome имеет следующие возможности:
- доступ ко всем графическим приложениям в системе, а также ко всем последним запущенным приложениям;
- доступ к последним открытым документам;
- осуществлять поиск по названиям и описаниям приложений, а также по названиям последних открытых документов;
- запускать приложения с помощью горячих клавиш, по умолчанию ALT+F1;
- а также другими функциональными возможностями.
Лично мне SimpleWelcome напомнило меню пуск в Windows 8, т.е. плитка, хотя, конечно же, дизайн отличается.
RocketBar — панель быстрого запуска приложений в нижней части экрана с возможностью переключения между ними. Одним из отличий RocketBar от стандартной панели KDE является возможность использовать иконки большого размера.
TimeFrame — это инструмент позволяющий отслеживать активность пользователя на ленте времени, например, находить файлы, которые Вы редактировали или создавали по определённым датам.
StackFolder — это функционал, который позволяет организовать быстрый доступ к наиболее часто используемым папкам и файлам.
ROMP (ROSA Media Player) – проигрыватель мультимедиа файлов.
Действующая стабильная версия
Актуальной на момент написания статьи является версия ROSA Desktop Fresh R6, она вышла 15 июля 2015, которая включает в себя следующие версии компонентов и программного обеспечения:
- Ядро Linux 3.14.44;
- Chromium 43.0.2357.134;
- Firefox 39.0;
- Thunderbird 38.0.1;
- LibreOffice 4.4.3;
- Audacity 2.1.0;
- Kdenlive 15.04.3;
- GIMP 2.8.14.
Также в эту версию, по сравнению с предыдущим выпуском (R5), включено достаточно много изменений связанных с компонентами SimpleWelcome и TimeFrame, изменения есть и в инсталляторе дистрибутива.
Системные требования
- Процессор с частотой 2.0 ГГц или выше;
- 1,5 Гб оперативной памяти для 32-битных версий, 2 Гб для 64-битных версий;
- 20 Гб свободного места на жестком диске;
- Монитор и видеоадаптер с поддержкой разрешения 1024×768.
Где скачать Linux ROSA Desktop Fresh R6?
Скачать ROSA Desktop Fresh R6 можно со страницы загрузки официального сайта вот она http://www.rosalinux.ru/rosa-linux-download-links/. Где Вам необходимо в разделе «Операционная система ROSA Fresh KDE R6», выбрать 32 или 64 битный ISO образ и нажать «Загрузить».
Установка
Не получается установить систему с USB-флэшки
- Проверьте контрольную сумму образа с помощью checkisomd5 <имяобраза>. Если проверка выдаст ошибку, скачайте образ еще раз.
- Используйте для записи флэшки программу ROSA ImageWriter, она есть под Linux, Windows и Mac
- Попробуйте другую флэшку и другой USB-порт
- Если у вас UEFI система, войдите в BIOS и переключитесь в legacy режим. Также иногда помогает обновление BIOS до последней версии.
- Если ничего не помогает, поставьте систему с DVD, записав его на второй скорости
Инсталлятор предлагает перезагрузку и автоматом форматирует в btrfs
Такое поведение иногда бывает при инсталляции в виртуальной машине или на диск без таблицы разделов.
Просто попробуйте еще раз, выбрав «Очистить весь диск» или свою разметку, ошибка больше не повторится.
Управление пакетами
Программное обеспечение может управляться через Rpmdrake или из командной строки. Rpmdrake выполняет свою работу, но не настолько удобен для пользователя, как другие программы, называемые сегодня «центром приложений» или «магазином программного обеспечения». Rpmdrake организует пакеты по категориям, и вы можете ограничить поиск типами пакетов, такими как «Пакеты с графическим интерфейсом» или «Мета-пакеты». Вы можете получить больше информации об отдельном пакете, щелкнув по его имени, и вы можете выбрать пакеты для установки, установив флажок.
Поиск пакетов может быть немного сложным. Вы часто получаете очень большое количество результатов, что затрудняет поиск того, что нужно (в частности, если вы не совсем уверены в точном названии). В других случаях поиск не дал результатов — например, при поиске «password» не было найдено ни одного менеджера паролей, даже если такие приложения, как KeePassX, доступны. Я не смог найти способ поиска строк как в имени пакета, так и в описании, и выбор «Help» из меню «Help» вернул «unknown error».
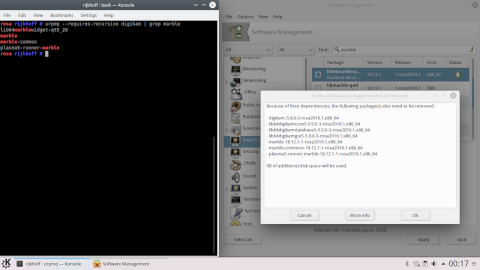
Репозитории ROSA довольно большие — любой пакет, который я хотел установить, был доступен. Хотя установка программного обеспечения работала не всегда. Например, я не смог установить VLC, потому что не удалось разрешить одну из его зависимостей и не удалось запустить браузер Tor из-за отсутствия модуля. Другое программное обеспечение будет установлено, но с неприятными сюрпризами. Когда я установил DigiKam, у меня также появилось приложение под названием Marble (я не понимаю, почему «виртуальный глобус» является зависимостью менеджера фотографий), почтовый клиент KMail имел 175 зависимостей и добавил шесть разных записей в меню приложения.
Мне было интересно управлять программами в командной строке, но там я столкнулся с другой проблемой: я понятия не имел, что использует менеджер пакетов ROSA. Дистрибутив ROSA поставляется с очень небольшим количеством документации, и, как уже отмечалось, ее веб-сайт имеет довольно ограниченный раздел на английском языке. Только после того, как у меня появилась блестящая идея проверить, какой менеджер пакетов использовал Mandriva, я узнал, что ROSA использует менеджер пакетов urpmi. Я не был знаком с urpmi, но после небольшого чтения мануалов я смог избежать Rpmdrake.
Насколько я могу судить, ROSA не поддерживает пакеты Snap и Flatpak. Я мог бы установить несколько простых пакетов AppImage, но более крупные приложения, такие как DigiKam, Geany и VLC, неизменно не запускались.
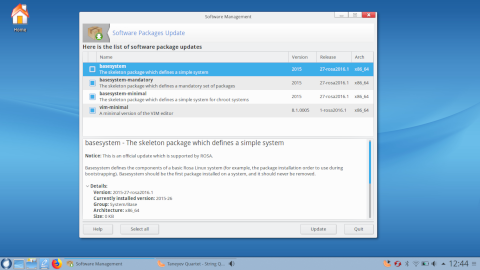
Что касается управления программным обеспечением, ROSA показывает уведомление, когда доступны обновления программного обеспечения. Обновления применяются с помощью Rpmdrake, и я не столкнулся с проблемами с обновлениями системы. Во время тестового периода я получил обновления примерно для 50 пакетов, все из которых были применены быстро и аккуратно. Приятно отметить, что Rpmdrake сообщает вам, что вы должны перезагрузить систему после обновления ядра.
ROSA использует свои собственные репозитории. Список репозиториев включает в себя репозитории «Main», «Testing», «Non-free» и «Restricted». Насколько я могу судить, ROSA использует зеркала только в России (моя система получает все свое программное обеспечение с mirror.rosalab.ru/rosa/rosa2016.1/repository/, и единственным альтернативным зеркалом, которое я смог найти, был репозиторий yandex.ru).
RED ОС
РЕД ОС — это дистрибутив Linux на основе пакетной базы формата RPM, который предоставляет универсальную доверенную среду для использования прикладного программного обеспечения, включающую большое количество сервисов и приложений. Ещё в этой ОС имеется средство графического терминального доступа, обладающее функционалом поддержки использования ключевой информации клиента в терминальной сессии.
РЕД СОФТ не стоят на месте и выпускают собственные разработки, которые предназначены для облегчения миграции с Microsoft Windows. Примером выступает RED WINE — ответвление от проекта WINE, которое позволяет использовать средства электронной подписи Windows-приложениями в среде Linux.
РЕД ОС улучшает поддержку российских программ, в том числе и FastReport.Mono. Совместно с «РЕД СОФТ» наши компании подписали сертификат о совместимости программного продукта FastReport.Mono с операционной системой РЕД ОС и СУБД Ред База Данных. Подробнее можно почитать тут.
Основные фишки ОС:
- Поддержка авторизации пользователя в домене Active Directory и механизмов централизованной авторизации по протоколам LDAP и LDAP+Kerberos;
- Поддерживает работу с файловыми системами Ext 2/3/4, ISO 9660, FAT, exFAT, NTFS, CIFS. Даже есть разбиение пространства жестких дисков с помощью подсистемы LVM на логические тома;
- Наличие в репозитории различных СУБД: PostgreSQL 10.6, MariaDB 10.1, Firebird 3.0 и драйверов для работы с ними;
Системные требования:
| Минимальные | Рекомендуемые | |
| Процессор | 1 ГГц тактовой частоты | 3 ГГц тактовой частоты |
| ОЗУ | 1 ГБ для конфигурации «Рабочая станция»
2 ГБ для конфигурации «Сервер» |
4 ГБ и выше для конфигурации «Рабочая станция»
32 ГБ и выше для конфигурации «Сервер» |
| Свободное место на жестком диске | 12 ГБ | 80 ГБ |
Первые впечатления
Последовательность загрузки ROSA в основном графическая. В меню GRUB используется фирменный стиль ROSA, и если вы решили зашифровать жесткий диск, вам будет предложено красивое поле ввода для ввода вашего пароля. Процесс загрузки не всегда радует глаз; вскоре после запуска Plymouth (приложения, обеспечивающего графический процесс загрузки) я получил много белого текста на черном фоне.
Экран входа в систему предоставляет вам все обычные параметры (выбрать среду рабочего стола, выключить/приостановить и т. д.), и вы увидите приятную анимацию во время загрузки рабочего стола. Что мне нравится в экране входа в систему, так это то, что ваши клавиши яркости и громкости работают как положено. В некоторых средах рабочего стола эта функция по-прежнему отсутствует, а это означает, что вам необходимо войти в систему, чтобы изменить яркость экрана или отрегулировать громкость.
Рабочий стол, который вы получаете после установки ROSA, почти такой же, какой вы видели в live-среде. Единственное отличие состоит в том, что значок установки на рабочем столе был заменен значком «Home», который предшествовал эпохе material design, но в остальном все одинаково. Как я уже сказал, мне нравится внешний вид рабочего стола Plasma от ROSA: он выглядит традиционным и функциональным. Единственное, в чем я не уверен, так это в Windows-подобных элементах управления окнами. Для тех, кто предпочитает более современный внешний вид, доступны темы Breeze и Oxygen.
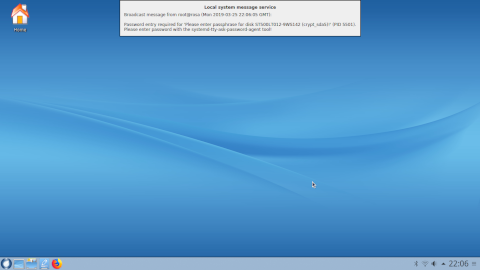
Вскоре после входа в систему я также столкнулся с первой из множества мелких неприятностей: в верхней части экрана появилось уведомление о том, что я должен ввести свой пароль LUKS для расшифровки жесткого диска. Предупреждение явно было бессмысленным, так как я бы не смог использовать ROSA, если бы не расшифровал жесткий диск во время процесса загрузки. Тем не менее, это предупреждение будет регулярно появляться во время моего теста.
Более приятным сюрпризом стало то, что заставка включается только после 60 минут бездействия. Любой другой дистрибутив, который я пробовал, устанавливает по умолчанию что-то вроде пяти минут, что лично меня слегка раздражает.
Подготовка к установке Rosa
1. Загрузка образа
Далее нажмите кнопку Скачать Rosa Fresh, а в следующем окне выберите нужную версию:
Как я уже писал, доступны версии с KDE 4, Plasma 5, XFCE, LXQT. Кроме того, поддерживаются как 32-, так и 64-битные версии.
2. Запись образа на флешку
Для записи Rosa на флешку разработчики рекомендуют использовать утилиту RosaImageWriter. Скачать её можно на странице выбора редакции дистрибутива.
Здесь есть версия для Windows, Linux и MacOS. После завершения загрузки нужно распаковать полученный архив и запустить программу RosaImageWriter:
В Linux программу надо запускать от имени суперпользователя. Затем в разделе Image выберите образ Rosa, а в разделе USB Device выберите нужное устройство. Далее нажмите кнопку Write и дождитесь завершения записи:
3. Настройка BIOS
Когда запись образа на флешку будет завершена, можно переходить к установке. В BIOS вашего компьютера нужно установить вашу флешку в качестве первого устройства для загрузки. Чтобы войти в меню BIOS, во время заставки BIOS несколько раз нажмите кнопку Del, F2, Shift+F2 или F8.
Независимо от того, старый у вас BIOS или новый, нужно найти меню Boot и в разделе Boot Device Priority установить на первое место вашу флешку, а затем сохранить настройки и выйти. Флешка должна быть подключена к компьютеру.
Резюме
Так же как и предыдущие версии Росы, эту я тоже могу рекомендовать к
использованию. Единственное замечание это устаревшая версия
KDE. Уже давно используется пятое поколение этой
графической оболочки. Само по себе KDE 4 не
проблема, но возможно возникнут сложности с установкой сторонних программ.
Если сравнивать Роса Линукс Р11 с другими дистрибутивами. Из российских
дистрибутивов это безусловно лучший. Во всяком случае наименее проблемный.
Но если брать шире, то уже не так однозначно. Есть
Ubuntu, есть OpenSUSE, Fedora,
CentOS.
Мне всегда, с первого теста, нравился этот дистрибутив. Но тем не менее,
лично для себя у меня пока не возникло сильное желание заменить
Ubuntu на Росу. Не потому что Роса плоха, просто
Убунта чуть лучше.
Установка Rosa Linux Fresh R11
1. Загрузка Live-системы
Уже в основном меню образа вы можете выбрать пункт Install ROSA Desktop Fresh R11 и сразу перейти к установке. Но я не рекомендую так делать. Лучше загрузить систему с LiveCD-образа, а уже потом запускать установку. Так вам проще будет исправлять ошибки, если они возникнут. Поэтому выберите пункт Start ROSA…
2. Выбор языка
Перед тем, как вы сможете воспользоваться Live-окружением, необходимо его немного настроить. Сначала выберите язык:
Прочитайте и примите лицензионное соглашение:
5. Настройка часового пояса и времени
Выберите часовой пояс. Меню выбора не очень удобное, так как нет значений отклонения от GMT:
Затем выберите, каким образом нужно сохранять и восстанавливать дату между перезагрузкамип: по местному времени или по UTC:
Раскрыв вкладку дополнительно, вы можете включить синхронизацию времени с интернетом с помощью NTP-сервера:
6. Запуск установщика
Только после всех этих настроек вы окажетесь в Live-окружении. Здесь вы можете посмотреть, что из себя представляет система, запускать программы и так далее. Чтобы запустить установку, выполните двойной клик по ярлыку Установщик в режиме Live:
На первом шаге установщика просто нажмите кнопку Далее:
7. Способ разметки диска
Здесь у вас есть два варианта. Либо позволить дистрибутиву разбить диск автоматически и использовать всё свободное пространство, или создать разделы вручную:
В этой инструкции мы будем разбивать диск вручную. Поэтому выберите Ручная разметка диска.
8. Создание корневого раздела
Дальше откроется окно редактора разделов. Щёлкните по свободному месту, чтобы его выделить. У меня никаких систем больше не установлено, поэтому все место свободное:
Затем кликните по кнопке Ext4, чтобы создать новый раздел с этой файловой системой.
В окне настроек раздела нужно выбрать его размер. Для корневого раздела я рекомендую брать не менее 20 гигабайт, так как здесь будут хранится все системные файлы, журналы и файлы приложений. Начало раздела оставляем там, где оно есть, а в параметре Размер в мб устанавливаем нужный размер корневого раздела. В качестве точки монтирования нужно выбрать /. Затем нажмите Ок.
9. Создание домашнего раздела
У вас появился корневой раздел. Теперь создадим домашний. Для этого кликните по свободному месту, чтобы оно стало выделенным:
И снова нажмите Ext4. Домашний раздел создаётся аналогичным образом, только в качестве точки монтирования нужно выбрать /home, а его размер уже выбирайтет такой, как вам нужно, — там будут ваши файлы, видео, фильмы, музыка и всё, с чем вы будете работать. Можно выделить всё доступное пространство.
10. Подтверждение разметки
После того, как разбивка будет завершена, нажмите кнопку Готово, а затем согласитесь с тем, что таблица разделов будет записана на диск:
11. Создание файла подкачки
Если вы не создали раздел подкачки во время разбивки диска, то утилита предложит вам создать файл подкачки. Его размер должен быть не меньше размера оперативной памяти, если вы хотите использовать режим сна или гибернацию.
Дождитесь, пока закончится распаковка файлов и установка:
13. Установка загрузчика
Выберите диск, на который нужно установить загрузчик и интервал до начала загрузки с пунктом по умолчанию:
Нажав кнопку Дополнительно, вы можете настроить дополнительные параметры загрузчика:
Введите пароль для пользователя root:
15. Создание пользователя
Введите имя, логин и пароль для пользователя, от имени которого вы будете пользоваться системой:
Нажав кнопку Дополнительно, вы можете выбрать интерпретатор команд и указать ID пользователя и группы вручную:
Введите имя компьютера, оно будет отображаться в терминале, а также для других устройств в локальной сети:
Закройте мастер установки и перезагрузите компьютер:
Введите логин и пароль пользователя, которого вы создавали во время установки:
История ОС
Разработка российского дистрибутива началась в 2007 году. Далее проходили исследования параллельно с разработками инструментария. Разработчиком и производителем ОС в 2010 году является группа компаний «РОСА».
В последующем были привлечены отдельные компании, занимавшиеся дополнительными исследовательскими задачами. Название было выбрано как сокращение от «Российские операционные системы».
За основу настольной версии была выбрана ОС Linux Mandriva. Сам вариант поставляемого дистрибутива именовался «Desktop Fresh R», где после шёл числовой номер версии.
В данное время наименование изменено. Первым словом поставлено ROSA. Как ROSA Fresh R10 или ROSA Fresh R9.
В качестве основы серверного варианта поставки была выбрана ОС Red Hat Enterprise Linux. Операционная система тоже известна профессионалам и обыкновенным пользователям.
Изначально ставилась задача разработки операционной системы для государственных органов, спецслужб. Потом основной разработанной продукцией стали сертифицированные ФСТЭК и МОРФ дистрибутивы.
Вплоть до 2012 года линукс rosa в сборке указанных операционных систем являлась дополнением. Позже уже начали появляться дистрибутивы собственной сборки. А о всех новинках заинтересованные лица могут ознакомиться в специализированном печатном издании «Точка РОСЫ». Здесь регулярно появляются материалы, где производится обзор функционала очередной операционки ROSA Linux.
Выводы
Из того, что я прочитал о ROSA, я понял, что цель дистрибутива — быть удобной системой для обычных пользователей. Если это действительно то, к чему стремится ROSA, то она в основном достигает этой цели. Действительно, все же есть некоторые недочеты, есть много преимуществ, и мне много чего в этой системе нравится.
Для меня основной областью, где ROSA потерпел неудачу, является управление программным обеспечением. Rpmdrake неудобен в использовании, и менеджер пакетов urpmi, вероятно, будет пугающим для большинства новых пользователей. Центр программного обеспечения с поддержкой разных форматов пакетов, таких как Snaps и Flatpaks, был бы желанным улучшением.